Evaluate Accuracy
Camera Accuracy
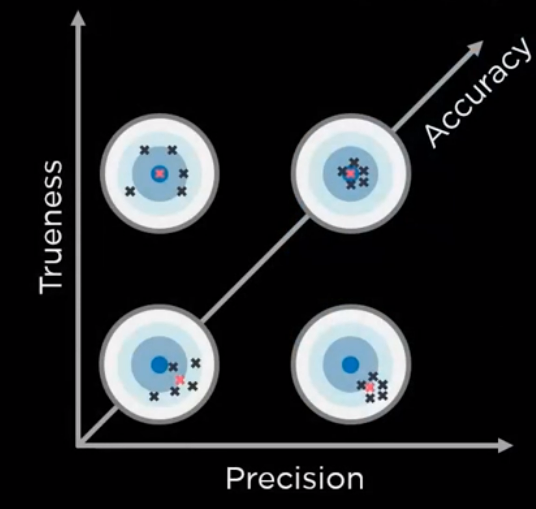
Camera accuracy is the comprehesive measure of the camera trueness and camera precision.
High camera accuracy represents that both camera trueness and camera precision is high: captured image/point cloud is at a good quality, low in noise, and the reflected object position in camera is the same as the object’s acutal position in space.
In oral communication, the term camera accuracy is usually refered to camera trueness.
The accuracy of a camera is affected by:
3D camera hardware and optical quality
Quality of camera calibration
Position of the object in the calibrated field of view
Camera temperature
Camera aging
Physical impacts, vibrations, and pressure
Camera Trueness
Camera trueness reflects the error between the position of the object in space and the position captured in the camera. Camera trueness determines whether the picking process can successfully pick objects in all positions and times within the field of view.
Camera trueness is highest at the camera’s focus point, and gradualy decrease as the object moves farther away from the focus point. The error of an object’s position on the edge of the camera’s field of view is higher than the error in the camera’s focus.
This increase in error applies to all axis: x, y and z axis, and the x, y axes have a slightly smaller impact relative to the z axis (x and y axis errors <0.1%), while the z axis has a slightly greater impact (z axis errors <0.2%).
Camera Precision
Precision reflects the noise level on the point cloud. The precision error will be high if the point cloud is noisy, which may be caused by following factors:
Low contrast
Ripple-like error caused by object motion
Ripple-like error caused by overexposure
DaoAI Camera Accuracy
DaoAI camera provides 0.2% accuracy, with x, y-axis accuracy <0.1% and z-axis offset accuracy error <0.2%. This means that, without considering other factors, at a capture distance of 100mm, the camera’s accuracy error will be at most 0.2mm. Similarly, at a capture distance of 1000mm, the camera’s accuracy error will be at most 2mm.
How to Validate Camera Trueness
Camera trueness can be effected by physical impacts, tempreature, and time of use. Therefore validating your camera trueness is important in accheiving successful pickings. When camera trueness is greater than the acceptable range (< 0.2%) then the camera will need to be calibrated again.
Recall that camera trueness is the error of the captured object position and the actual object position.
To verify this error, we can use a known sized object, the calibration board for example: the distance between the cirlces are known. We can compare the distance captured by the camera with the actual disctance which we know.
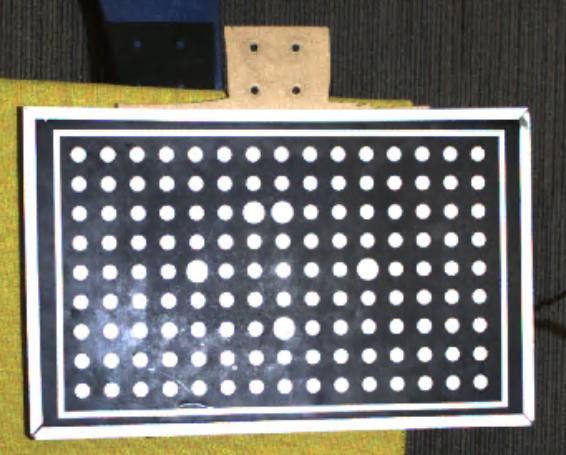
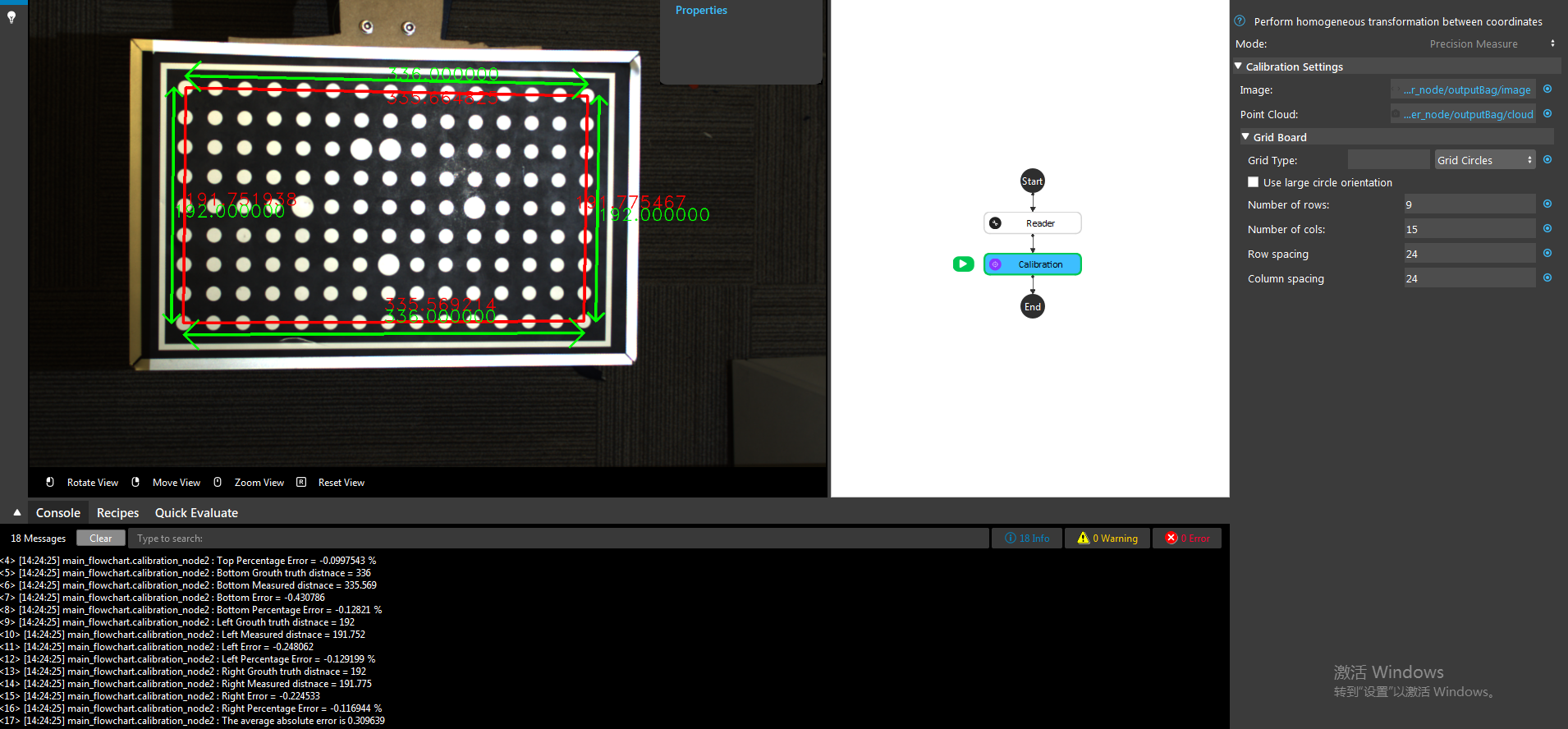
For example, the calibration board has 15 cirlces a in a row, and each one is 24mm away from another, that is, the row should have a distance of 336. Suppose this distance measured in camera is 335, then the camera trueness can be calculated as (336.5-335)/336 * 100% = 0.15%.
If you have DaoAI Vision Studio installed, you can use the calibration node’s precision measure mode to validate camera trueness.